
The State of Robotics – May 2021

Gabriel Aguiar Noury
on 14 June 2021
Tags: Automation , robotics , thestateofrobotics
May was another fantastic month for robotics developments. In a continuously growing field, where the opportunities are many and the challenges require innovative solutions, researchers keep leading the way. Here at Canonical, we understand the value of open knowledge and collaboration. So this monthly blog brings some great research, available to you and me.
Climbing robots – the floor is getting bigger
There are several designs for making robots capable of climbing ceilings. However, this latest robot from Bioinspired Robotics and Design Lab at UCSD managed to stick to smooth surfaces using a vibrating motor attached to a flexible disk.
According to UCSD researchers, this is possible thanks to “the fluid mediated adhesive force between an oscillatory plate and a surface”. See the diagram of the system below. The 14cm diameter flexible disk in the picture vibrates at around 200 Hz, creating a thin layer of low-pressure air between itself and the surface that it’s vibrating against. Similar to the suction effect, this thin layer of air, which is less than 1 mm thick, allows the disk to resist 5 N of force pulling on it. However, the disk doesn’t need to be constantly sealed against a surface, which allows the robot to move freely.

This vibration method can tolerate sudden loading when moving, and the disk’s flexibility allows the robot to move on curved surfaces. The challenges start when sizing the robot. Going smaller means that the motor will take up a disproportionate amount of weight, conversely going larger means the amount of adhesion that you get decreases. Either way, the big advantage here is the simplicity and affordability of the system.
AI designing AI
Google’s chip designing AI now needs less than six hours to generate chip floorplans with better power consumption, performance, and area than those made by people. Experts typically need months of iteration to do this task. An AI takes only a few hours.
AI acceleration began aiming to offload CPU workload in mathematic intense operations. Today, one of the ways of achieving this is with custom-designed machine learning inference chips. They help perform AI algorithms faster and more efficiently. The challenge is that it takes years to design a chip, while machine learning algorithms move a lot faster than that. Ideally, you want a chip that’s optimised to do today’s AI, not the AI of two to five years ago. That’s why Google started developing AI to design AI chips.
The task is complex. Designers need to place blocks of logic and memory, including clusters of those blocks, in a way that power and performance are maximised while reducing the area of the chip. For those of us that have worked with PCB, we can understand the struggle. Even with today’s advanced tools, it takes a human expert week of iteration to produce an acceptable design.
So Google’s researchers Goldie and Mirhoseini modelled chip placement as a reinforcement learning problem. Unlike typical deep learning systems, reinforcement learning systems learn by doing; adjusting the parameters in their networks according to a reward signal received when they succeed. Three parameters dictated the reward, a proxy measure of a combination of power reduction, performance improvement, and area reduction. As a result, the agent becomes better at its task the more designs it does.
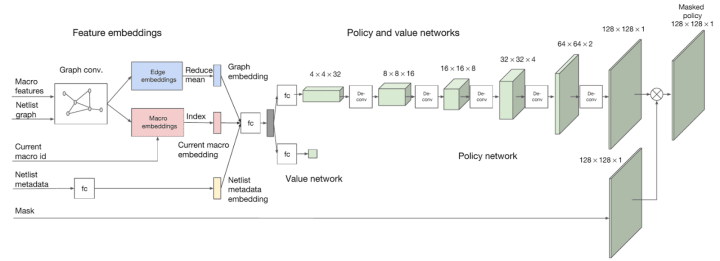
Figure taken from (Mirhoseini et al, 2021) Policy and value network architecture. An embedding layer encodes information about the netlist adjacency, node features and the current macro to be placed. The policy and value networks then output a probability distribution over available grid cells and an estimate of the expected reward for the current placement, respectively.id, identification number; fc, fully connected layer; de-conv, deconvolution layer.
Goldie and Mirhoseini hope AI systems like theirs will lead to the design of “more chips in the same period and also chips that run faster, use less power, cost less to build, and use less area”.
Robotics Award 2021 goes to ABB´s PixelPaint car painting
The Innovation and Entrepreneurship in Robotics & Automation Award (IERA) honours the achievements of innovators that create world-class products. The IEEE Robotics and Automation Society (IEEE/RAS) and the IFR jointly sponsor the award. This promotes strong collaboration between science and industry in robotics.

This year’s winner was ABB with their PixelPaint car. This system consists of two high-precision robotics arms that make car painting faster. It also increases sustainability, as it eliminates overspray benefiting the environment. But the added value is its flexibility, allowing manufacturers to efficiently respond to custom requests, with two-tone and customised designs applied in one pass.
Applying a two-tone or customised design to bodywork is time and labour-intensive work. It requires the vehicle to be put through the painting line twice: once for the first layer and then after the areas had been masked, again for the second colour. This work requires the presence of staff, masking the bodywork. Around 10 to 20 operators per shift are required.
With PixelPaint, there is no longer this challenge. Using an inkjet head to eliminate overspray, PixelPaint ensures that two-tone paint and individual designs are applied in one pass, without masking and demasking.
Besides, 20 to 30%t of paint is wasted due to overspray. The inkjet head of PixelPaint applies 100% of the paint to the vehicle surface.
ROS migration
With ROS Kinetic and Ubuntu Xenial reaching EOL, you will stop receiving security updates – for this reason, we do not recommend staying in an unsupported distribution of Ubuntu or ROS.
We encourage you to explore migration options to keep your robot compliant with security maintenance frameworks.
To learn more about the implications of EOL watch on-demand our webinar about ROS Kinetic EOL. Together with Sid Faber, our security expert and head of the robotics team at Canonical, we will explore the implications of EOL and security.
Outro
Our robotics community, which has found on Ubuntu a platform to grow the robotics field, never ceases to amaze us. Every month we see how the community is constantly defying the boundaries of what can be done. We are not tied up to the floor anymore, we defied traditional processes and we innovate for sustainability.
And we want to keep learning from you! This is a blog for the community and we will like to keep featuring your work. Send a summary to
[email protected], and we’ll be in touch. Thanks for reading.
Talk to us today
Interested in running Ubuntu in your organisation?
Newsletter signup
Are you building a robot on top of Ubuntu and looking for a partner? Talk to us!

Related posts
The State of Robotics – 2022 news rewind
Welcome to our 2022 robotics news rewind! We’ll be highlighting some of the most impressive feats of robotics engineering that we covered throughout the year...
The State of Robotics – August 2022
Another fascinating month for robotics. Researchers are the highlight of the month. Through their work, we are pushing the boundaries of self-awareness,...
Deploying scalable AI and real-time robots at ROSCon 24
Another year, another ROSCon! This year we’re setting off to Odense, Denmark. At Canonical, we are excited to once again sponsor this event for a community...